Hoe een robot te bouwen met Raspberry Pi
Robotica is een opwindende manier om mensen kennis te laten maken met programmeren, maar het kan soms ook een beetje moeilijk zijn voor nieuwkomers om het onder de knie te krijgen en het is ook duur.
Iedereen in staat stellen een eenvoudig te bouwen en kosteneffectieve robot te maken, is een belangrijke stap in hun leerproces. Dus in deze tutorial zullen we onze eigen robot bouwen en een Python 3-bibliotheek maken waarmee iedereen deze kan besturen.
Voor dit project heb je nodig: elk model Raspberry Pi; Raspbian , een Wi-Fi-dongle en de Raspberry Pi aangesloten op uw thuisrouter; een USB batterij, een robot chassis kit , een L298N motorregelaar ; vier AA-batterijen en wat Blu-tack.
Het bouwen van een robotchassis is een geweldige bezigheid en de kit (hierboven vermeld) wordt geleverd met alles wat je nodig hebt om aan de slag te gaan. U moet de rode en zwarte draden aan de motorklemmen solderen, als u niet kunt solderen, is dit een goed moment om van een vriend te leren.
AANBEVOLEN VIDEO’S VOOR U …
Solderen
In dit project kochten we een robotchassis-kit van eBay met twee DC-motoren. Deze motoren worden geassembleerd geleverd, maar moeten voor stroomvoorziening twee draden aan de klemmen worden gesoldeerd. Solderen is een essentiële vaardigheid van een maker en het is heel gemakkelijk te leren, hoewel toezicht door volwassenen essentieel is voor onze jongere potentiële soldaten.
Er zijn veel YouTube-instructievideo’s, maar het beste is van Carrie Anne Philbin (hieronder).
Sets voor soldeerbouten kunnen worden gekocht voor ongeveer £ 10, maar een goed voorbeeld is de Antex XS25 voor ongeveer £ 25, wat een geweldige starter is voor intermediaire soldeerbout.
Solderen moet worden uitgevoerd in een ruime, goed geventileerde ruimte met een vrije werkruimte. Solderen is erg leuk en je lokale hackspace / LUG kan je helpen om op een veilige manier te leren.
Hoe een robot te bouwen met Raspberry Pi
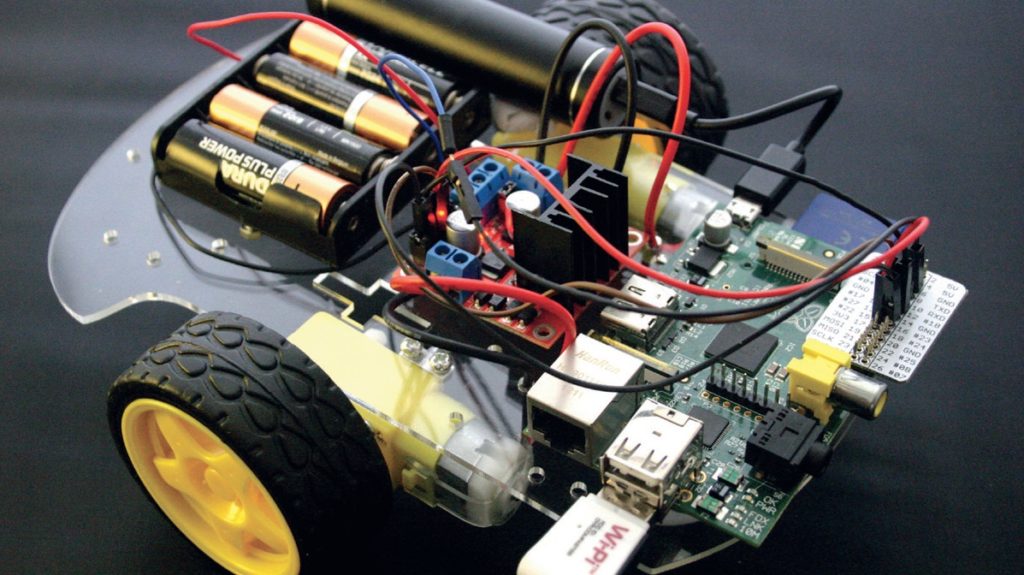
Het L298N-bord zit boordevol componenten. De schroefklemmen maken verbindingen mogelijk tussen de batterijen, Raspberry Pi en motoren
Nu het chassis is gebouwd, concentreren we ons nu op de motorcontroller, een L298N H-brugcontroller. Een H-brug zorgt ervoor dat een motor voor- en achteruit kan gaan. Onze L298N heeft twee uitgangen voor onze motoren, de linkerkant wordt bediend door OUT1 en 2, de rechterkant door OUT3 en 4.
Sluit de draden van uw motoren aan op deze klemmen en zorg ervoor dat ze goed vastzitten. Ons AA-batterijpakket wordt aangesloten op + 12V en GND-aansluiting.
We moeten ook een van de GND van onze Raspberry Pi aansluiten op de L298N GND-terminal. Op de L298N zien we vier pinnen gemarkeerd met IN1 tot IN4. Dit zijn ingangen die we gebruiken om de L298N aan te sluiten op onze Raspberry Pi GPIO-pinnen (General Purpose Input Output).
Door een GPIO-pin in of uit te schakelen, kunnen we de invoerpinnen overeenkomstig activeren en de motorrichting regelen. We sloten onze inputs aan op de volgende GPIO-pinnen: IN1 t / m 17, IN2 t / m 22, IN3 t / m 18 en IN4 t / m 23. We gebruikten de Broadcom pin mapping, een standaard ingesteld door de Raspberry Pi Foundation.
Bekijk deze geweldige referentie voor de GPIO waarin Broadcom-pin-mapping wordt uitgelegd.
Ontdek wat u nog meer kunt doen met de kleine pc met onze verzameling Raspberry Pi-projecten




